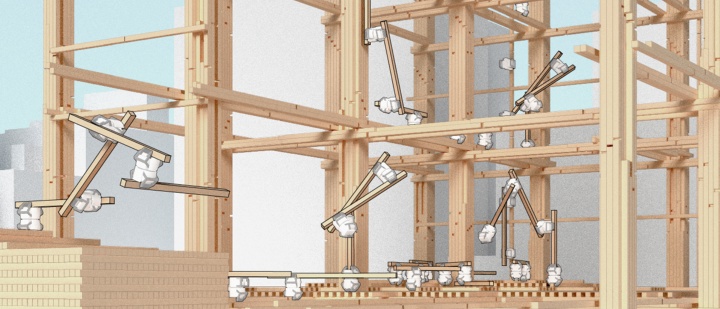
The project focuses on the investigation of in-situ construction and assembly processes on the construction site using distributed robotic systems ("distributed robotics"). The term refers to a large number of small, agile construction robots that can produce complex, functionally adapted assemblies from individual parts in highly parallel processes. The advantage of distributed robotics is that the machines are small and inexpensive and can therefore be operated in parallel in large numbers. Distributed robotics also promises considerable advantages with regard to the solubility, sorting purity, and reusability of components. The goal of this project is to explore the basic features and characteristics of timber building systems that will unlock the potential of distributed robotics for the construction industry.
Futher information at IntCDC.